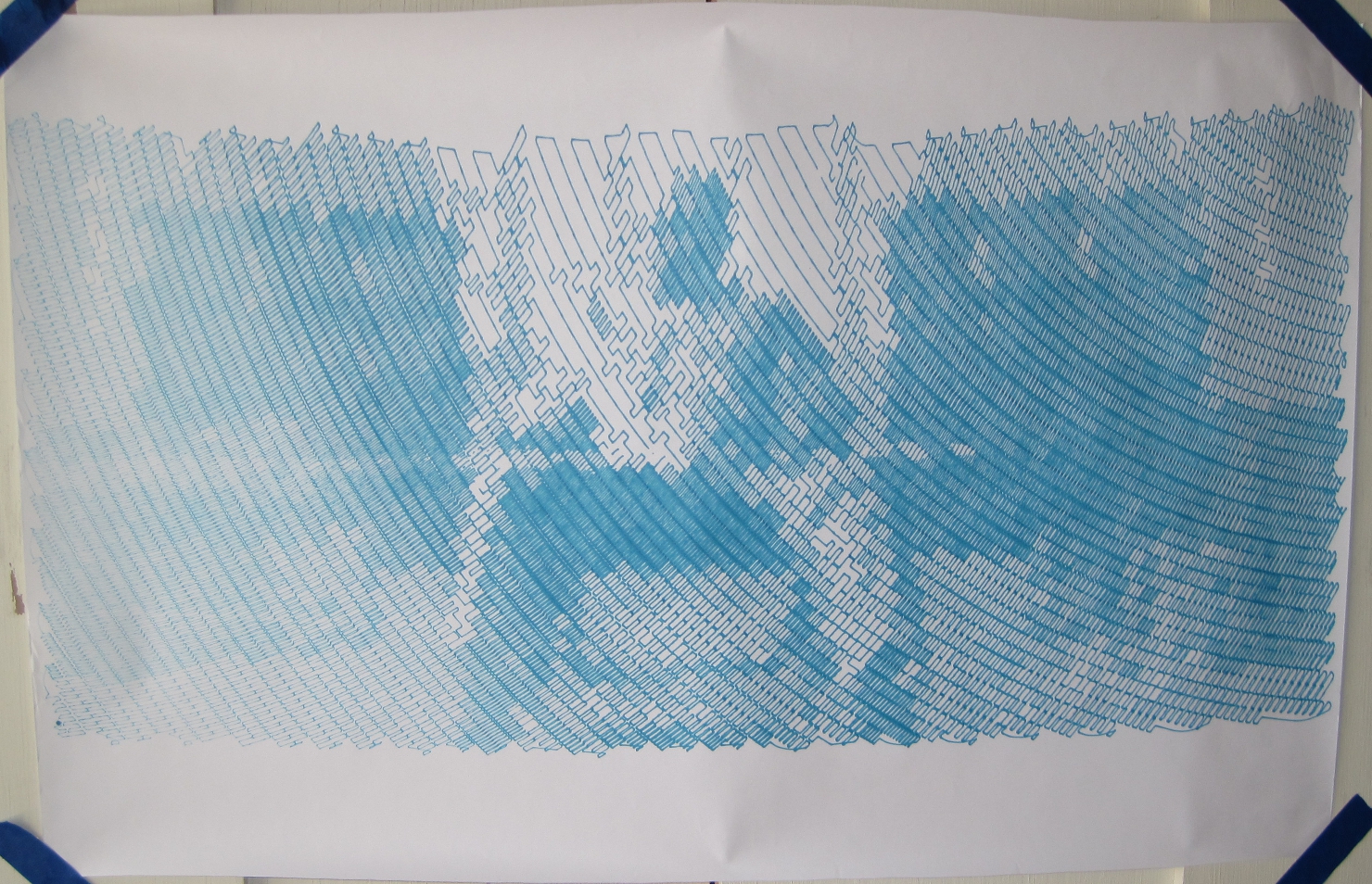
Doctor Who “To Victory” Dalek poster, red Sharpie on banner paper, 28″ tall x 23″ wide
Another robot drawing from exhibiting at Maker Faire Bay Area 2013. This is the result of my PlotterBot drawing a cropped version of the “To Victory” Dalek poster on the BBC website which was released with the “Victory of the Daleks” episode from 2010. ((Those faithful readers of my blog posts may recall my other attempt to memorialize this same drawing)) This drawing is red Sharpie on banner paper, 28″ tall x 23″ wide. The dimensions refer to the drawing, not the sheet of paper. This drawing took about eight hours.
Unfortunately, this drawing was longer than the sheet of paper I had allocated for it. You can see at the bottom of the drawing a white uncolored patch where the blue tape was covering the edge of the paper. However, if you can get over that defect, this is still a cool poster – and the biggest drawing I had ever done up to that point.
Since this drawing was posted on the fence at Maker Faire 2013, rolled up, archived, unrolled, transported to Maker Faire 2014 where it was displayed again, you can see a little wrinkling of the paper at the edges. As you can also see, the drawing went off the edge of the paper.