
Linus the Artistic Robot
I’ve always intended that this website be about more than just the few robots that I’ve built. It’s also about other robots that perform art, especially those that draw. I’m hoping to make these kinds of “plotter profiles” a more regular thing on this blog.
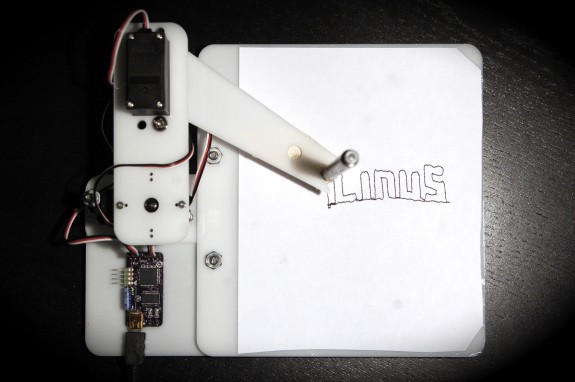
Every once in a while I do a search on Kickstarter just for drawing robots. Last week I happened upon Linus – a simple drawing robot which uses open source software. With only a few days to go on the campaign, I reached out to the creator Jacob Balthazor of PixelatedThoughts.com and asked him a few questions.
- Why a drawing robot? Were you inspired by any other project in developing your robot?
- I guess I was attracted to the poetic irony of a robot; a word we attribute with being mechanical, orderly and blind to creativity, that can create a piece of art in the very human way of dragging a pen across paper. I am working on some software to take this idea further. The program would make Linus randomly grab a picture off of the internet and interpretively draw it daily. This way you would always have a new piece of art every day, freeing Linus from the creative bounds of the users creativity.
- Have you used it for anything else other than drawing? What else could you do with this robot?
- Because of Linus’s simplicity it can be very easy to modify and and even swapping the utensils he hold can lead to vastly different functions. I am very excited about the possibility of using the circuit scribe pens (a pen that can essentially draw a wire) with Linus to draw intricate circuit patterns on paper. I am interested to see what other applications people come up with for Linus.
- What was the hardest part about designing this robot? Why did you choose to go with a inverse kinematics instead of an XY gantry?
- The most difficult part of creating Linus was solving the inverse kinematics (difficult non linear geometry problem) math problems to translate the x and y locations that the drawing programs uses to the angles that the robots arm would take to go to those locations on the paper. Tthe mathematical solutions are something that even take a computer a bit of time to compute which is difficult when the robot needs the equations computed fifty times per second. Most other robots are not constructed with arms for this very reason and have mechanisms that move them directly in x and y directions without the need of an equation doing space transformation between. But it was the use of an arm in Linus which allowed us to keep the cost of parts down. Linus would have been less reliable and significantly more expensive if we constructed it with an XY gantry.
- Why servos instead of steppers?
- Servos offered a more complete and compact solution. If steppers were used instead, a couple things would have happened with the design. First Linus would have grown in weight and size messing with the small form factor. The weight of the steeper on the suspend second joint could potential cause problems. Because steeper motors without gearing don’t have quite the resolution as servos, a gear system would be needed adding quite a bit of complexity, increasing the price and number of things to fail. The servos allowed for great resolution, and ultimately kept the design elegant and less expensive to produce.
- What is the drawing area?
- The drawing area of Linus is currently 4.5 inches square. But we are working on a way to expand the drawing area potentially to six by six through messing with the inverse kinematics equations and software.
Thanks Jacob! Good luck with your Kickstarter campaign!
Default Series Title
Pingback: Doodle Clock by Ekaggrat Singh Kalsi | PlotterBot