It would be incredibly difficult for me to pick my favorite kind of plotter / drawing robot. I love hanging plotters for their impressive scale and low cost. I love EMSL’s AxiDraw and EggBots for their incredible precision, bulletproof design, fantastic support, and deep community.
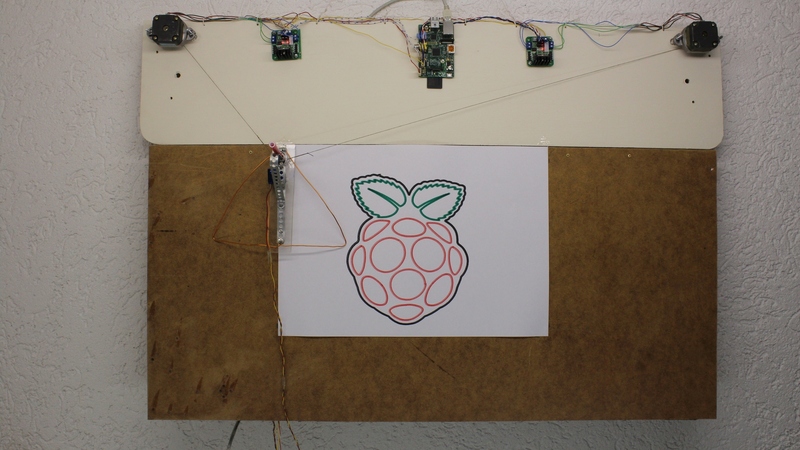
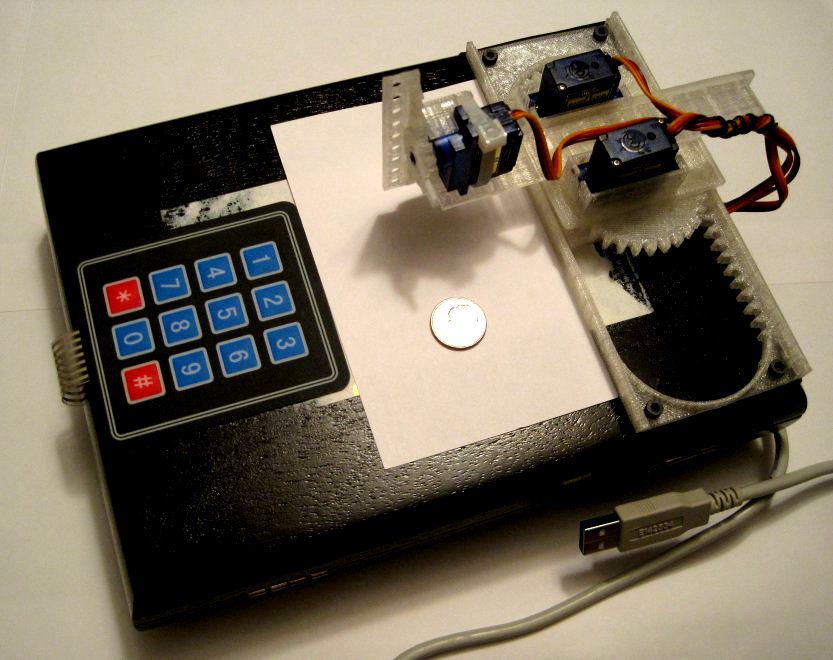
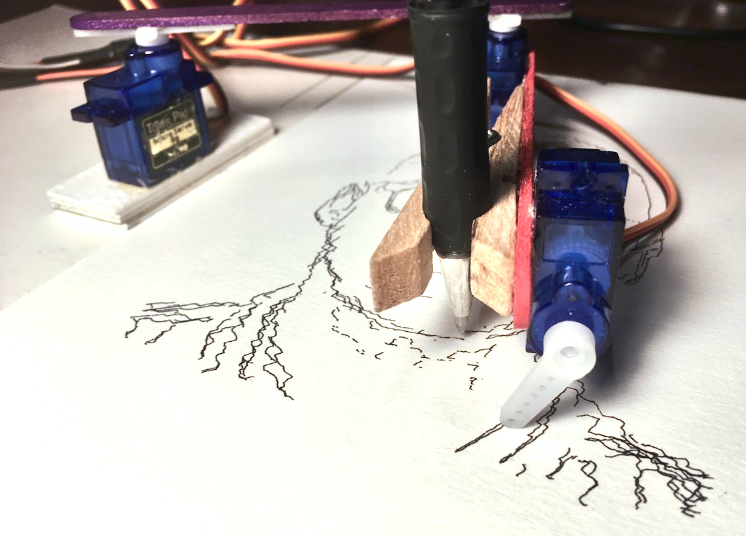
But, I’ve got a real soft spot for a microcontroller + 3 servos. Daniele’s BrachioGraph is a self-described “cheapest, simplest possible pen plotter.” Seeing as how there’s little more to this drawing robot other than a Raspberry Pi Zero, three micro servos, a USB cable, a pen, a few bits of wire and … just … stuff? (Some of their pictures include popsicle sticks, clothes pins, binder clips, nail files, and presumably glue or rubber bands. Despite the deceptively simple build of materials, the GitHub has 34 contributors and has continued to be developed over the last 4 years, and as recently as 5 months ago.
In fact, this project has been around so long (since 2019) that a write up on the Raspberry Pi blog describes the microcontroller as being “$5 Raspberry Pi Zero.” Ever since RPi Zero’s became unobtainium, it’s difficult to find them scalped for as little as $25, let alone the current sticker price of $10.