The Last Centurion by tsuzukicream
In my last post I considered the cost of producing and selling exactly one set of plastic parts for a Tiny CNC. While a fun experiment, I would go mad trying to do that same process over and over 100 times. Fortunately, scaling production up to 100 units doesn’t require a descent into madness – just a bit of careful planning. Here I’m choosing 100 as this seems to be the first point at which volume price breaks begin to appear.
Walking Before Running
I think producing 100 kits would be awesome. I would love to see 100 tiny drawing robots drawing tiny drawings. However, with several key aspects still left to finish (Z axis/pen lift and software being first on this list), it probably makes more sense to create just 10 kits of plastic parts to get to just 10 people for help testing and making.
Looking Ahead to 100
If my Replicator could crank out the parts with zero supervision that would be one thing, but to produce 100 sets, it would take 200 hours of uninterrupted printing. On a given weekday I couldn’t make more than one set each evening evening and perhaps four or five a day on the weekend if I was at home the whole day. At that rate it would take me a about 7 weeks of consistent regular printing to create 100 sets. Given the time commitment required for 100 sets, I would probably have to outsource the production of plastic parts. I haven’t ever done such a thing before, but I’ve already reached out to manufacturers of plastic parts to find out what this might cost.
What Makes A Kit A Kit?
First, an anecdote about sandwiches and why I won’t buy them from a certain national chain. When I go to this particular shop and I select a sandwich the Sandwich Artist making it will pause at a certain point during the sandwich creation process and as, “Would you like to add cheese/extra meat for $X more?” The answer that always springs to mind is, “No, why don’t you make it with the correct proportions of everything in the first place?” The point being – I hate it when corners are cut and I appreciate it when it’s clear time, effort, and care went into the creation of a thing in the first place. This is the reason I loved my MakerBot Cupcake CNC kit and my EMSL produced Egg-Bot kit. These guys lovingly produced, packed, and shipped their kits in a way that showed they cared deeply about their product and customers.
If I think of these kinds of kits as the “gold standard,” what then should I include in a Tiny CNC kit? So far people have asked kits into what I’d break down into three broad categories – everything, Bring-Your-Own-Arduino, and just plastic parts.
- A “deluxe” Tiny CNC kit should include absolutely everything you’d need except a computer. It would need to have all the motors (3x micro servos), plastic parts, pen, and Arduino. For a truly all-in-the-box solution, it would also need rubber bands, a USB cable, and maybe sandpaper, jumper wires, or a mini Philips head screwdriver. Alternatively, I’m trying to work out a way to power the Tiny CNC from an Adafruit Trinket.
- A “BYOA” kit would probably only be the plastic parts and servos, since anyone who had their own Arduino would probably already have everything else contemplated in a “deluxe” kit.
- A “BYOP” kit would probably be just servos and an Arduino or similar. Anyone who has a 3D printer or access to one would probably have everything else.
- A “barebones” kit for a Tiny CNC wouldn’t be anything more than a bunch of plastic parts with a piece of paper suggesting several compatible servo motors.
Producing Plastic Parts
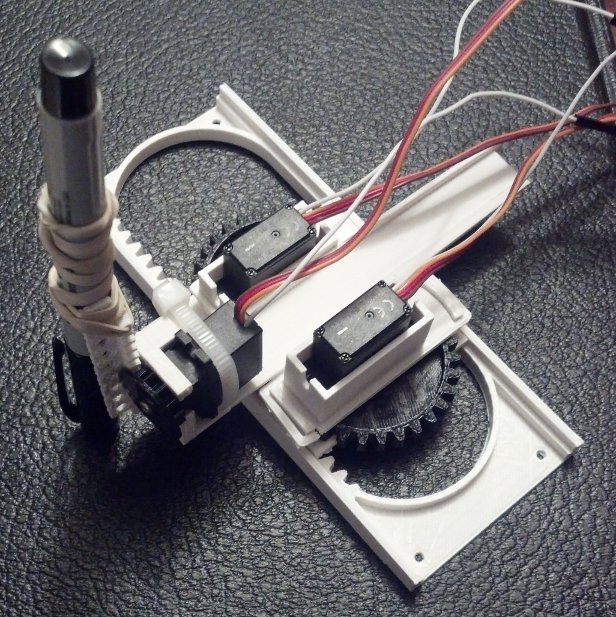
As mentioned above, producing 100 kits would basically require I outsource the production of plastic parts. However, this brings a host of other considerations. The last published version of the Tiny CNC includes a normal rack and pinion whereas the version I’m working on now incorporates a herringbone rack and herringbone pinion. These are great for reducing backlash – but not possible to produce via injection molding or most other mass production processes. Thus, either the parts are 3D printed or they don’t have this extra little bit of awesome engineering. I anticipate the next version of this robot will have 8 printed parts, 6 of which have herringbone components. With 75% of the parts not able to be mas produced either this will be a 3D printable kit or I will have to include non-herringbone parts in the kits.
Now, there is a way, of sorts, around this problem. I can think of a way to not use herringbone racks and pinions and still have a reduced backlash, but it would basically double the number of plastic parts, double the number of steps to assemble, and really complicate the design. I like the idea of a low number of parts and easy assembly. Given this isn’t ever going to be a hyper precision machine, losing the herringbone rack and pinions doesn’t seem like a horrible loss.
What Kind of Arduino?
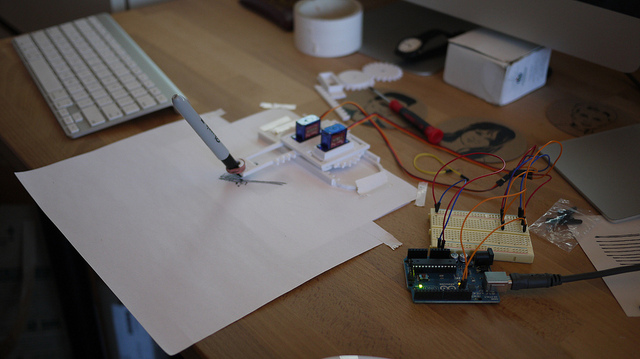
I’ve wired up my Tiny CNC to two different kinds of Arduinos – an Arduino Uno and a Mintduino. I’m also in the process of trying to get it to work with the Adafruit Trinket, which for reasons I’ll discuss below, is my board of choice.
- Mintduino. The Mintduino was definitely the easiest way to wire up my Tiny CNC since there were plenty of places to plug the power, ground, and control lines for the servos. The “problem” is that the Mintduino requires a $15 FTDI Friend or similar.
- Arduino Uno or Similar. The great thing about the Arduino Uno and similar is they are ubiquitous and easy to program over USB, no need for an FTDI Friend. The problem with using an Arduino is that it doesn’t have three separate places for 5v power and three separate lines for ground. To bring out the power and ground lines would require lots of little wires or a separate breadboard.
- Adafruit Trinket 5v.
- The $8 Trinket 5v version is just enough to power three servos – if you’re careful and pull the 5v power from the USB line and not the 5v through the internal power regulator. While you still have the same “needing three separate places for 5v power and three separate lines for ground” problem as the Arduino, this may be a lot easier to deal with for a Trinket. There are two other small problems with the Trinket which are not at all insurmountable. The Trinket doesn’t have an on-board clock, so it would have to use a kind of “hacky” servo timer solution. Also, the Trinket doesn’t have a proper serial port, so the solution is a “fake” serial connection that is even more “hacky” than the servo timer solution.
- Saturday, with the generous time and assistance of Matt Stultz, I created a Trinket shield circuit board design for a tiny circuit board which would bring the power, ground, and three necessary pins for the X, Y, and Z servo motors out to headers for easy connections to the micro servos. If I could get a bunch of these produced, it would be easy for anyone to connect a Trinket to the shield, plug in three servos, and then fire up the Tiny CNC. Assuming the boards with all the headers was only $3 or so, the total brain power for the Tiny CNC would only be about $11 total. I like this solution for a number of reasons.
- Like ripples in a pond, the solution of a tiny custom board creates tiny problems in turn. A custom board would need to be purchased through one vendor, the components for the board through a second vendor, all the parts sorted and packaged into each kit properly, and the end user would need to do the soldering of these tiny kits. There should only be 19 solder joints – but requiring soldering means more work for the end user.
- Besides being a super tiny form factor, I like the idea of a plug-and-play solution just for this tiny robot.
Can I Really Do This?
Doing some thought experiments in a spreadsheet tells me that the little tiny “hidden” costs start to add up to not only eat into profits, but quickly would put me in the red. ((My daughter just insists on eating and being clothed for some damn reason. I mean, every day? Really??)) I’ve tried to account for all of these things, but it’s hard to predict everything in advance. I’ve never undertaken anything like this, so I have no way of knowing if this is really feasible for just one guy with a full time day job.
I would love to make money as a result of my Maker hobbies. I’ve “made money” from my Maker hobbies before, but never really enough to actually do much more than cover the gross “unhidden” costs. I generally figure the time I spend on such projects is similar to the time people spend on their hobbies which have no potential for income, so it doesn’t really bother me.
Long long ago I told a friend that I could think of no finer way to live my life than to dream up cool and clever things and then doing and making them. Being paid to blog, write, think up nifty designs, testing, and building things is about as close to that utopia as I can imagine. While I’ve had other projects that seem like they might lend themselves to a kit, this is the first time where I’ve had an inkling that it like might possibly pan out.