It’s been about a week since my last blog post and I’ve really been enjoying working on all aspects of the Tiny CNC. With the year winding to a close, I wanted to squeeze in one last update.
The really cool thing about working on a robotics project from the ground up is that you can work totally different aspects of the project, whatever happens to interest you at that moment. Sometimes 3D design appeals to me, other times working on Arduino or Processing code. And then sometimes working on making the project really real by contacting suppliers to source parts for kits. Here’s what’s going on now:
- Adventures with Online Ordering. I pulled the trigger and bought 100 micro servo motors. I’m hoping that once I get this tiny drawing robot’s designs a little more finalized some people will be interested in having me create kits for them. I simply cannot tell you how much fun it was to open up a box fresh from China stuffed with 100 motors. ((And one Arduino Uno of dubious authenticity)) I spent several days shopping around on Alibaba and trying to reach out directly to motor manufacturers and in the end I finally placed an order with a “distributor/middleman” because it was a decent deal and he could ship immediately. I know I overpaid a little, but this is kind of a test run anyhow. With 100 micro servo motors, and each robot taking 3 motors, I’ll be able to create at most about 30 bare-bones kits for sale.
- Micro Servo Motors. These are the really common, and reasonably cheap, TowerPro SG90 motors that you see for sale everywhere. People who have printed the Tiny CNC on Thingiverse to date have had to try to get their more standard micro servos to work in my designs that were made for the more badass Batan 2122 analog feedback micro servos that I received courtesy of Adafruit and Make. ((I call these motors badass because they’ve got metal gears inside rather than plastic, analog feedback so they can sense and report their position back to the microcontroller, and cost $15 each))
- Arduino Code. With the gentle prodding of TechNinja42, I created a Github account where I’ve uploaded some of the Arduino code I’ve been experimenting with so far. While I have uploaded my prior sketches to Thingiverse, Github does seem like a better place to share these files which are changing quickly. If you grab this code and load it up, you’ll be able to control your Tiny CNC drawing robot just by using the Arduino’s serial monitor and the WASD for directional control and OL to raise and lower the Z axis.
- Teaching Programming to a 6 Year Old. Christmas day was the first time I wrote some Arduino code that actually made my robot do something interesting. Long story short, I actually got my daughter on the first step to programming. I had her draw a simple shape on some graph paper, we took down the coordinates, plugged the coordinates into the Arduino code, and then the little robot got to work. We had a great time creating the program and an even better time watching the robot repeat her drawing, pause for five seconds, and do it again. The reason for the five-second pause was so that we could slip a sheet of paper into the robot, have it draw something, then pull the paper out. I can’t wait to get this robot drawing more complex pictures. 🙂
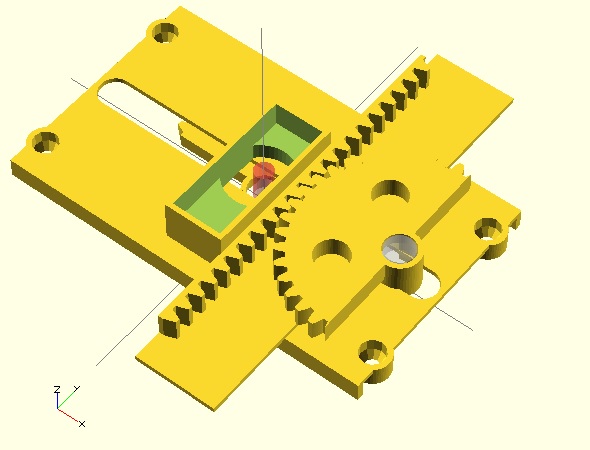
- Tiny 3-Axis CNC Redesign, Again. I’ve already started revising my designs to work with the Tower Pro SG90 motor form factors, so it will be easier for everyone to print and build their own drawing robots. I’ve added lots of improvements based on feedback from those who have printed their own, and I’m very nearly done with this latest version. So far it is shorter, probably uses less plastic, should be offer more stable and accurate drawing, and uses one more plastic piece than prior versions – all while slightly increasing the drawing area. Since I offered a sneak peak at this design in progress in an earlier post, I’ll leave off with a glimpse of this design-in-progress.
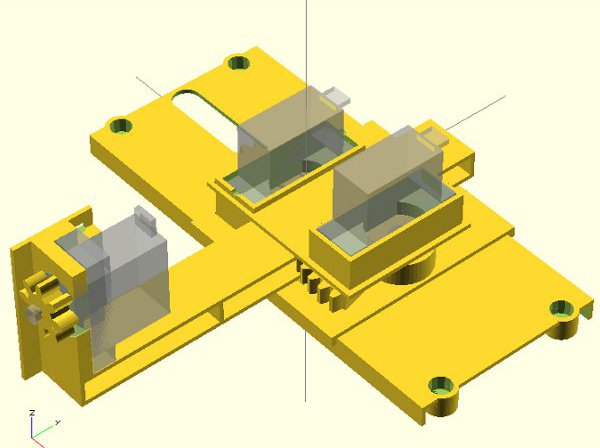
Tiny 3-Axis CNC version 0.34