Join me at Maker Faire 2015!!!
Maker Faire Bay Area 2015 is just a few days away! I hope you’re as excited as I am!
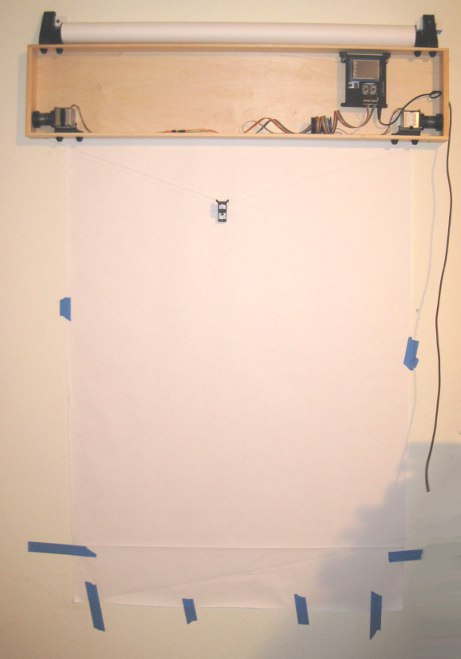
I’ve made some minor improvements to my large drawing robot and am going to bring a tiny drawing robot as well. The changes to the big drawing robot are:
- “Feet” for Underside of Project Box
- My robot is built into a shallow wooden box. On the top of that wooden box there is a “holder” for a roll of paper. By adding little “feet,” as short as 1/8 inch or so, to the underside of the project box, the box no longer pushes against the roll of paper – which makes it easier to pull paper down when drawing.
- Revisions to Paper Roll Holder
- As it is, the paper roll holder is a little close to the project box, so the paper sometimes bumps against it. This isn’t much of a problem, but one that can be eliminated easily.
- A notch in the top of the paper roll holder. This way, rather than having to dismantle the robot, I can just lift the old paper roll out and drop in a new one.
- Batteries for Pen Holder
- The pen holder uses AA batteries, not for power, but for dead weight. Right now the batteries are held in place by hot glue. I would rather there was a slot on the holder for actually holding the batteries.
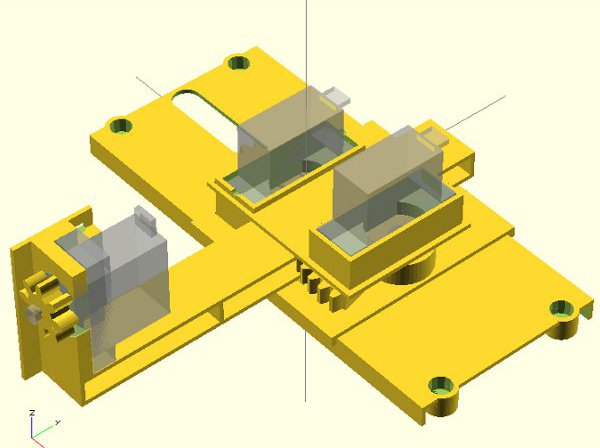
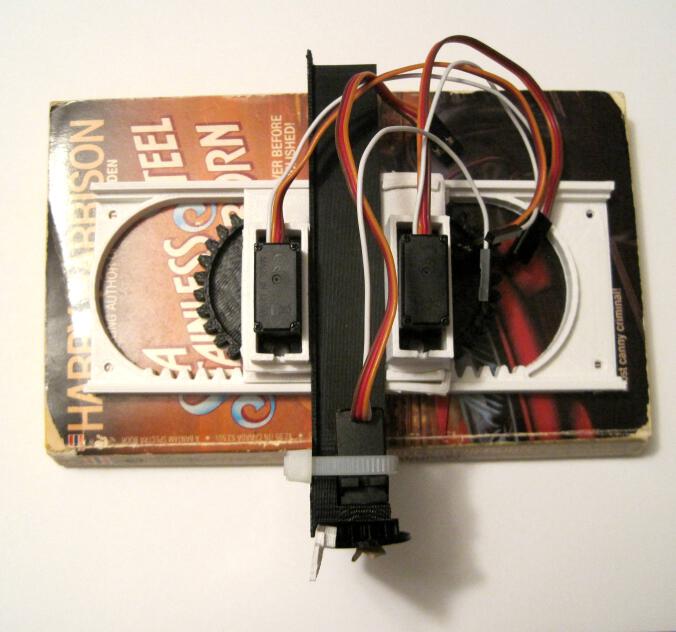
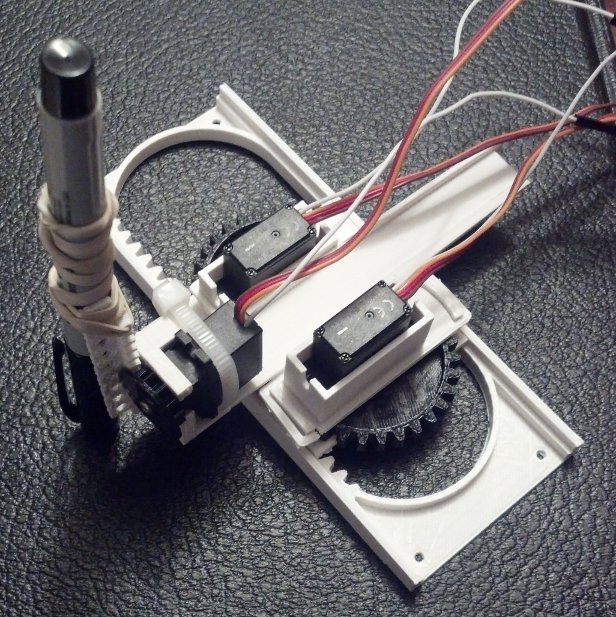
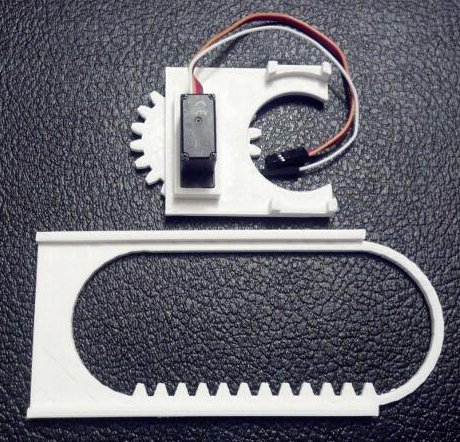
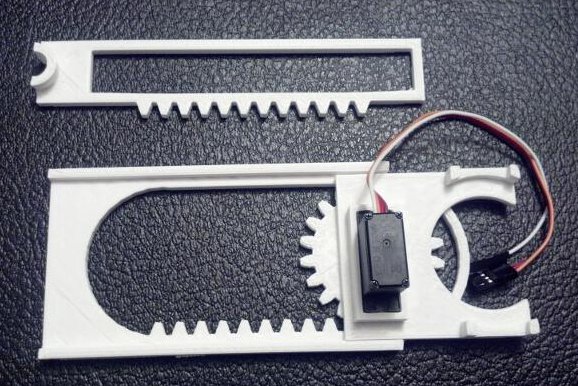
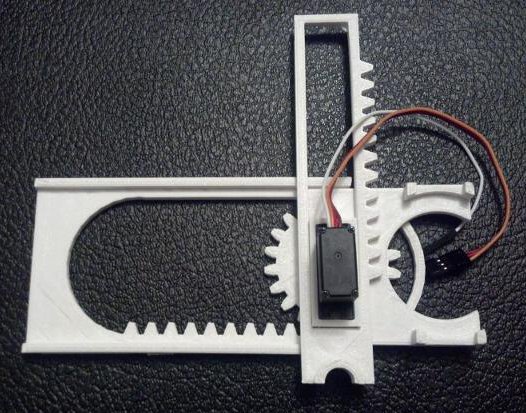
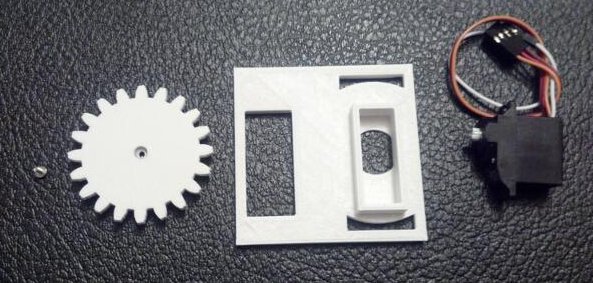
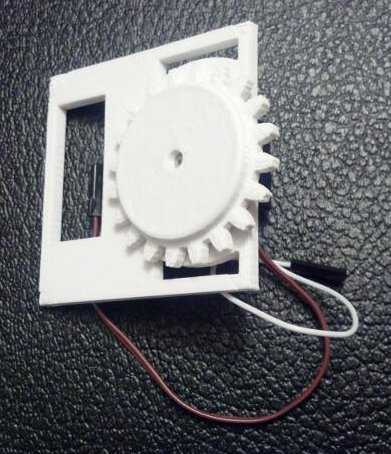
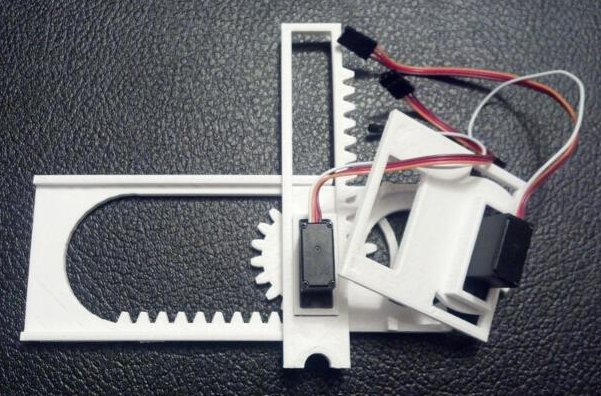
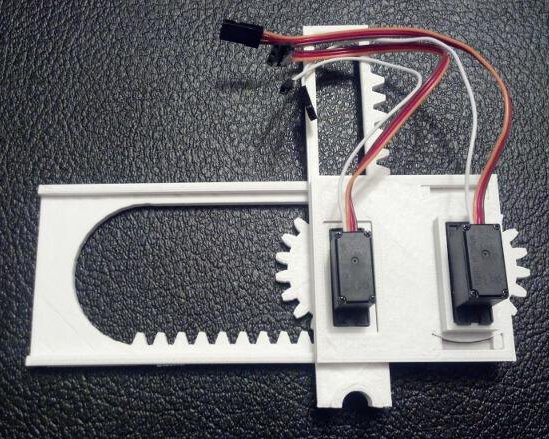
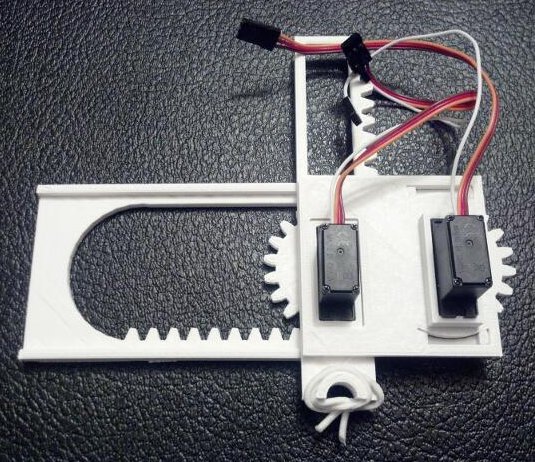
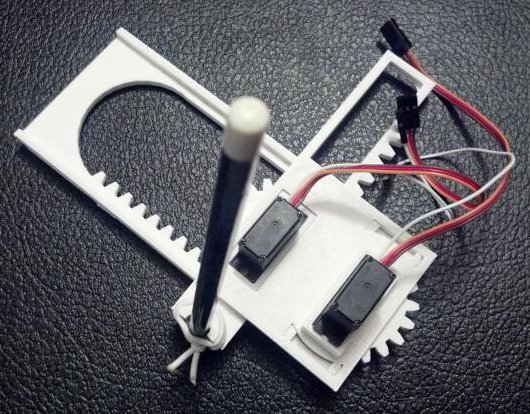
And, for those of you interested in seeing more of my TinyCNC, I’ll be bringing that too! I’ve been working on a little something there as well. Here’s what I’ve done:
- Mounted TinyCNC
- On a cigar box! The TinyCNC is bolted to the top of a cigar box kindly donated by a local smoke shop. A small solderless breadboard and Arduino now live inside the cigar box as well.
- Trying out New Interface
- I tried using the TinyCNC at first with an Arduino, feeding it Gcode-like commands over the serial interface. Then I tried saving designs as coordinates and flashing an Adafruit Trinket with the coordinates and drawing that. Since the Trinket doesn’t have a serial connection, this meant I lost a lot of the functionality of the tiny robot.
- This time I’m using a membrane 3×4 matrixed keypad to control the robot. The keypad is also mounted to the cigar box.
- Trying out New Code
- I can get the Arduino to recognize keypresses reliably, but I can’t get the ‘bot to move in response… yet. 🙂 Heck, I still have almost 36 hours until showtime, which is plenty of time. So far, it does absolutely nothing at all – except shudder. I’m not that worried about it though, I can always go back to an older version of the Arduino sketch.
As far as actually showing a working demonstration of the TinyCNC, I have a few ideas. Here’s what I’d like to show off, in descending order:
- Tiny robot, controlled by a numeric keypad, letting people draw on pieces of paper and take them home.
- Tiny robot, with several pre-programmed designs, letting people hit a number on a keypad, having it draw a pre-programmed design, and taking the piece of paper home.
- Tiny robot with a single push button mounted on box, which draws a single pre-programmed design when pressed, people take the piece of paper home.
- Tiny robot, connected to my laptop, drawing things sent from the laptop, and let people take a piece of paper with the drawing home.
What will be ready by Friday afternoon? I have no idea!!! You can either stop by and see for yourself or tune in on Monday night when I post a recap of the weekend.