
If you’re here checking out my site after my presentation, you can check out all the slides from my presentation above. If you’d like more information about the individual things in the slides, I posted an update for most of them over on Hackaday. If you’ve still got some questions, feel free to leave a comment below, hit me up on twitter, email me directly.
Tag Archives: maker faire bay area
Maker Faire 2016 Drawing Robot Presentation Slides
Maker Faire Bay Area 2016 was a wild ride! If you were able to come to my presentation on tiny drawing robots – thank you! If you weren’t able to make it, I’m sorry I missed you. I got to see some old friends1 and make some new ones2 , which is probably the biggest reason I blog and exhibit and present at Maker Faire.
Admittedly, I was a concerned that I would be talking to a bunch of empty benches, that I would run through all of my slides in the first five of my allotted 25 minutes, or that I would be presenting to a completely silent crowd. If you came to the presentation, you got to see that none of those things happened. I started talking to the crowd a little early, answering some questions and letting people try out my demonstration robot with the keypad. When I actually started the presentation the benches were full and there were several people standing around them. There were some really great questions from the audience and lots of enthusiastic ideas.
If you didn’t come to the presentation, you missed both of my daughters making impromptu appearances, one uncooperative robot, one cooperative robot, and you had the chance to grab a “maker card” and actually use my demonstration robot.
As promised, I’ve posted my slides (above) so you can relive the magic.
Tiny CNC Drawing Robot
- An Itty Bitty Drawing Robot
- Tiny CNC Drawing Robot - Cost Estimate
- How to Build a Tiny CNC Drawing Robot
- Design considerations with the Tiny CNC
- Uses for a Tiny CNC Robot
- Tiny CNC - An Experiment in Commerce
- How to Wire a Tiny CNC
- Tiny CNC Software Update
- How to Build a Tiny 3-Axis CNC Drawing Robot
- Nine Drawing Robots On the Loose!
- Competing Design Ideals in a Drawing Robot
- Tiny Drawing Robot Updates, Incremental Progress, and More!
- The Tiniest Drawing Robot Actually Draws!
- Robot Friends: Tiny CNC and the WaterColorBot
- Tiny Drawing Robot Gallery
- TinyCNC Drawing Robot Software User Guide
- Drawing Robot AFRON 2013 Design Challenge Entry
- Drawing Robot In A Box
- Drawing By Numbers
- TinyCNC: Too Many Ideas
- TinyCNC - Working Keypad UI
- Don't let SkyNet win! Take this poll!
- Care and Feeding of Your TinyCNC Drawing Robot
- Maker Faire 2016 Drawing Robot Presentation Slides
Don’t let SkyNet win! Take this poll!

Do NOT let this happen!
I want to put some finishing touches on my TinyCNC drawing robot before Maker Faire, but I’m a little ambivalent about how best to show off it’s drawing/CNC abilities.1 There are several excellent ways to control such a robot – perhaps you can help me decide? My thought is that an IR remote would be really nifty, since I could just hand the “control” to someone and they could play with the robot, getting it to draw something. Then again, feeding gcode to the ‘bot and having it actually draw something semi-recognizable would also be great.2
For context, here’s the links to the various possible ideas for control mechanisms:
- Sending gcode over USB
- Physical numeric keypad
- IR remote – perhaps with this part from Adafruit
- A small joystick, such as this one from Adafruit
- Potentiemeters for Etch-a-Sketch-like wheels
- This wacky soft circular potentiemeter
Please vote above3 and let me know what you’d like to see working at Maker Faire!
Tiny CNC Drawing Robot
- An Itty Bitty Drawing Robot
- Tiny CNC Drawing Robot - Cost Estimate
- How to Build a Tiny CNC Drawing Robot
- Design considerations with the Tiny CNC
- Uses for a Tiny CNC Robot
- Tiny CNC - An Experiment in Commerce
- How to Wire a Tiny CNC
- Tiny CNC Software Update
- How to Build a Tiny 3-Axis CNC Drawing Robot
- Nine Drawing Robots On the Loose!
- Competing Design Ideals in a Drawing Robot
- Tiny Drawing Robot Updates, Incremental Progress, and More!
- The Tiniest Drawing Robot Actually Draws!
- Robot Friends: Tiny CNC and the WaterColorBot
- Tiny Drawing Robot Gallery
- TinyCNC Drawing Robot Software User Guide
- Drawing Robot AFRON 2013 Design Challenge Entry
- Drawing Robot In A Box
- Drawing By Numbers
- TinyCNC: Too Many Ideas
- TinyCNC - Working Keypad UI
- Don't let SkyNet win! Take this poll!
- Care and Feeding of Your TinyCNC Drawing Robot
- Maker Faire 2016 Drawing Robot Presentation Slides
- Photo by tenaciousme [↩]
- Heck, the robots are small enough that I’ll probably bring more than one. [↩]
- Or, comment below [↩]
Harry Potter Hogwarts Crest
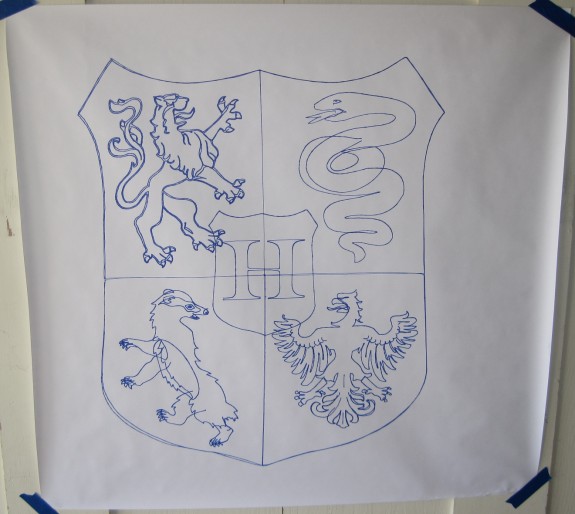
Harry Potter Hogwarts Crest poster, blue Sharpie on banner paper, 25″ tall x 20″ wide
At this year’s Maker Faire Bay Area 2014 all of my robot drawings were done with the use of the pen lift mechanism. This allowed me to create big awesome pictures in less time than it would have taken by using single line drawing techniques. Although less ink is used, the use of the pen lift mechanism introduces a delay between each line. This drawing of the Harry Potter Hogwarts Crest by Jmh20 took about two hours to finish. The drawing is blue Sharpie on banner paper, 25″ tall x 20″ wide. The dimensions refer to the drawing, not the sheet of paper.
{kind=link}
Drawing from scalable vector graphic formats sometimes takes a bit of extra setup. In the case of this image, I removed several of the layers from the image. The reason for deleting layers is that the robot will draw every edge of every layer – including those that mostly overlap with others. This is why the raven’s wing and lion’s claw can be seen through the center of the crest. Most of what I eliminated consisted of extra outlines.
This was the very last drawing I completed at Maker Faire Bay Area 2014.
Bay Area Maker Faire 2013 Drawings
I’ve been meaning to share these drawings from Maker Faire Bay Area 2013 for more than a year now. As I was reinstalling my PlotterBot to its original home on our living room wall I figured this was a good time to take pictures of these drawings to share. I’ve also added a quick blog post to go with each of these drawings, to add a bit more background. Here are the links to the Doctor Who dalek poster, Game of Thrones House Stark dire wolf poster, and Breaking Bad’s Walter White poster.
At last year’s Maker Faire my PlotterBot did not have a functional pen lift mechanism. I had designed a pen holder with this ability in mind, but I still hadn’t actually tried it out. In fact, it wasn’t until about two weeks after Maker Faire that I actually got a reliable pen lift working. One of the great things about these “single line super pixelated drawings” is that they’re big and bold. I also really like the abstract nature of this drawing style and how it promotes appreciating the works from a distance. The downside to them is that they take a really long time and basically use up an entire pen with each drawing.
I had several other drawings on display back in 2013 – including a traveling salesman problem style Death Star, Yoda, and Nikola Tesla portrait. This last one I gave to Joey Hurdy when he stopped by the booth just after Maker Faire ended on Sunday.
Maker Artist Ytai Ben-Tsvi and his IOIO Board Plotter

Ytai showing off his plotter art at Codame 2013
Easily one of the most memorable aspects of exhibiting at this year’s Maker Faire Bay Area was getting to meet and interact with lots of other Makers. Ytai Ben-Tsvi had built and brought a pen plotter of his own design – and it was amazing.
Ytai’s pen plotter used an Android tablet, his IOIO OTG board1 , two stepper motors, two comically large spools, and lots of custom code to turn pictures taken with the tablet into instant portraits on the fly.
His plotter was everything a Maker Faire exhibit should be – highlighting the intersection of art and technology while inviting the audience to be a part of the action. Can you believe this guy was reluctant to call himself an artist?
After Ytai was invited to participate in the Codame 2013 art-tech festival2 he decided to create an entirely new drawing algorithm to turn images into a single line drawing which appears to be sharp scribbles up close and a detailed image from a few meters away.

Photo transformations with Ytai’s ScribblerDemo
What I love about Ytai’s drawing process is that it produces a drawing with a sense of whimsy and movement without the hard number crunching necessitated by a Traveling Salesman Problem3 style drawing.4 By allowing the algorithm to have lines cross over one another, something the TSP method eschews with its own aesthetic, Ytai’s drawings essentially gets “for free” extra dark patches where lines closely intersect.5
Looking at this drawing, it seems to me that an SVG created from his algorithm conveys so much more meaning with far less points than a TSP file. At least for my own PlotterBot, far fewer points would also mean a much faster, and more satisfying to watch, drawing. I would estimate that in the time it took Ytai to cover a wall, I might have been able to create one, perhaps one and a half, drawings. And, as any good Maker does, Ytai has shared the fruits of his hard work in the form of the source code on Github.
Plotter Profiles
- Ytai’s succinct description of the IOIO board says it all, “The IOIO-OTG is a printed circuit board for electronics hobbyists and prototypers, which addresses a very common problem: how do I use my {computer, tablet, phone} to control my {robot, dish-washer, cat-feeder, etc.}.” [↩]
- An art-tech festival?! Why the hell aren’t there more of these things?! [↩]
- Link to blog post showing a method [↩]
- Doesn’t exactly hurt to have a cute kid as a subject either [↩]
- Having played with TSP drawings a lot, I have discovered that finding the right balance between lightness versus darkness and simplicity versus complexity and quick versus glacial to be… maddening. Like H.P. Lovecraft maddening [↩]
PlotterBot Frequently Asked Questions

Display Posters at Maker Faire Bay Area 2013
Although I’ve helped out at the MakerBot booth several times in prior years, this was the first time I had my very own booth.1 I had a great time answering questions and explaining how the robot worked. I thought you might be interested in some of the questions:
- What holds the pen up? Magnets?
- My PlotterBot suspends the pen holder by fishing line – which is nearly invisible from more than a foot or so away under normal lighting. Under very bright light, the shadows of the fishing line do start to appear. However, from more than a foot or two away, it looks like the pen holder is floating around the surface of the paper. Unless you notice the motors turning the pulleys, it almost looks magical.
- Sandy Noble’s Polargraph uses beaded cord and Der Kritzler uses toothed belts. While these machines lack the “magic quality” one gets from using fishing line, the are a capable of more repeatable accuracy.
- What software do you use?
- I use Sandy Noble’s Polargraph firmware and software, running on an Arduino Mega shield (“Polarshield SD“) of his design. I purchased most of my electronics directly from Sandy and I can’t recommend them enough.

Maker Faire Display Board
- What kind of accuracy/resolution does it have?
- This was a difficult question to answer. To explain I pointed to the large text banner at the top of the project board next to my robot. You can download all of the materials from my PlotterBot Maker Faire exhibit here or you can see a copy of the text just after I managed my first successful pen lifts.
- I would estimate that the robot could probably manage to just barely draw from around 30pt font to an arbitrarily large size. However, if you used beaded cord or, better yet toothed belts, and small sprockets or gears in conjunction with a fine tip pen you could probably manage even finer repeatable accuracy.
- How fast can it go?
- I suggested that the entire robot adhered to that most basic of all engineering principles – “Good, cheap, and fast – pick two.” It’s fairly cheap and easy to build and yields pretty amazing results, but there is a practical upper limit to the speed with which you can operate the robot. If you run it too fast, the motors may skip steps resulting in poor results. Also, running it too fast would likely also cause the pen to skip across the drawing surface or might not give the pen enough of an opportunity to leave an ink trail. For best results, I try to find a speed that works well with my pen holder and pen to draw quickly enough so the pens don’t bleed much and slow enough to get good results.
- How big can it draw?
- Basically, an unlimited size. There are some practical limitations from the Arduino software which suggest that a 63 meter diagonal is the biggest you can accomplish with Sandy’s software. However, with some more effort to tinker with the code, there’s no real reason why even larger sizes wouldn’t be possible. Also, the larger the pulleys/sprockets/gears the larger the drawing could be as well. Bill Ola Rasmussen posted some very interesting mathematical considerations regarding line tension and the practical limitations of resolution at the edges of the machine’s capabilities. Basically, if you want a big drawing, you need a really big robot.
- While all this is very abstract, it’s also nice to show how these kinds of robots can reach amazing proportions. Sandy has used a Polargraph to draw across huge wall sized installations. (About 20 feet wide). Two similar machines, Hektor which draws in spraypaint and Viktor which draws in chalk, were used to draw on entire walls.
- What kind of pens do you use?
- The short answer is Sharpies and art marker pens. I like the “Prismacolor Premier Chisel Fine Double Ended Art Markers.” I’ve since devoted an entire post discussing the best pens and markers to use with a wall drawing robot.
- How long does a drawing take?
- 2′ x 3′ drawing typically takes about 4-6 hours depending upon the density of the drawing and thickness of the marker line. The longest drawing I’ve ever done took about 8 hours. And it was AMAZING.
- How do you create these drawings?
- The software basically translates normal images (JPG) into very pixelated versions of themselves and then into instructions the robot’s firmware understands. The process is a little more direct for vector drawings, converting the SVG files directly into instructions for the robot. I can send the instructions to the robot either over USB or saving them to an SD card which it reads.
- How much did it cost to make?
- I sourced all the parts I needed for my first robot, rather than trying to scrounge for motors and wire. As a result, it probably cost around $100 for a machine that used an Arduino Uno and an Adafruit Motor Shield and had to be tethered to a computer via a USB cable. For someone willing to tear apart old electronics and hack things together from scrap wood, it could probably be built for around $30-$50. The robot I had on display cost around $250 in electronics, $10 for the cost of the printed plastic parts, about $40 for the wood and hardware, and a wooden box left over after a catered event. To buy plastic parts, all the hardware off the shelf, and electronics would probably cost about $500.
- Well, I did share the space with my daughter! [↩]
Liked our booth at the Maker Faire? Take it home with you!
Subscribe to my mailing list to get a PDF with all the materials from the Maker Faire booth plus all the information, links, videos, and resources you’ll need to build your own PlotterBot from scratch – even if you’ve never tried building anything before!
I promise not to spam you, ever. I will only send you e-mail about how to build your very own robot and updates to any plans.