
Maker Faire Bay Area 2016 was a wild ride! If you were able to come to my presentation on tiny drawing robots – thank you! If you weren’t able to make it, I’m sorry I missed you. I got to see some old friends1 and make some new ones2 , which is probably the biggest reason I blog and exhibit and present at Maker Faire.
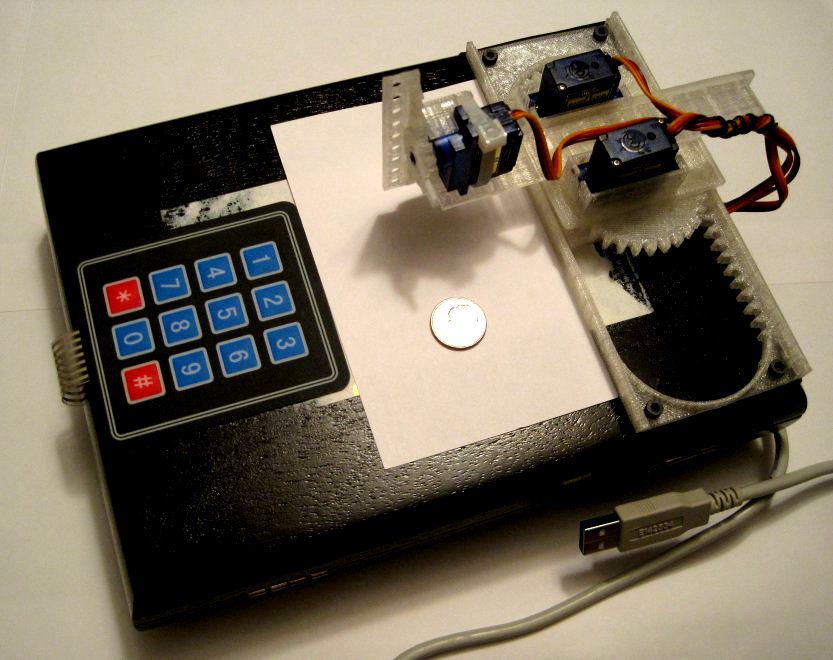
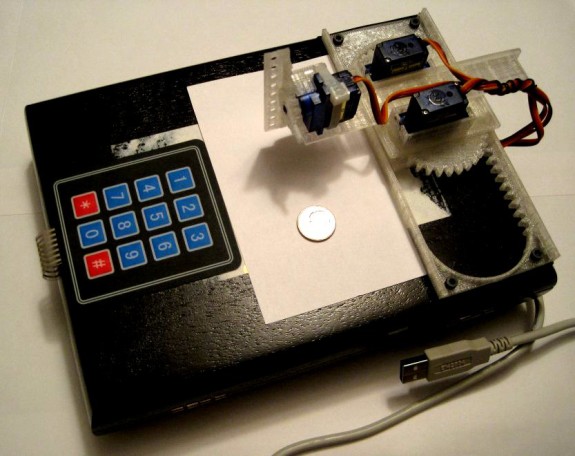
Admittedly, I was a concerned that I would be talking to a bunch of empty benches, that I would run through all of my slides in the first five of my allotted 25 minutes, or that I would be presenting to a completely silent crowd. If you came to the presentation, you got to see that none of those things happened. I started talking to the crowd a little early, answering some questions and letting people try out my demonstration robot with the keypad. When I actually started the presentation the benches were full and there were several people standing around them. There were some really great questions from the audience and lots of enthusiastic ideas.
If you didn’t come to the presentation, you missed both of my daughters making impromptu appearances, one uncooperative robot, one cooperative robot, and you had the chance to grab a “maker card” and actually use my demonstration robot.
As promised, I’ve posted my slides (above) so you can relive the magic.




{kind=link}